


R&S标准接收机测试方案
之前给大家介绍过车载卫星导航以及车载卫星导航在测试中遇到的难题,对此,罗德与施瓦茨公司提供了实时卫星导航模拟器SMBV100A以及实时高端卫星导航模拟器SMW200A,在GNSS接收机测试环境中可为工程师提供最大的灵活性,帮助他们实施调整和控制,轻松地进行重复测试。 不仅如此,罗德与施瓦茨公司还提供了以卫星导航模拟器SMBV100A为基础的车载导航测试解决方案以及高端导航模拟器SMW200A为主的先进车载导航测试方案。包括标准接收机测试、特殊条件下测试、特殊事件下的测试、先进的接收机测试、车载导航自动化测试等。 其中标准接收机测试是指的常见的接收机测试项目,是接收机基本性能的重要保证。车载导航标准接收机的测试,包括:首次定位时间、捕获/跟踪灵敏度、静态/动态定位精度、重新捕获时间等指标。 首次定位时间TTFF 首次定位时间 (Time to first fix,TTFF) 指的是接收机首次搜星获得定位的时间,该指标非常重要,直接影响接收机用户的使用感受。测试过程中SMBV模拟固定位置的卫星星座图,用户可以把SMBV设置成“Auto Localization”模式,该模式下SMBV自动设置卫星参数,用户可以选择预定义的城市或者自定义坐标,模拟的卫星总数最多可达到24颗。对于该项测试,参考电平通常设置为高于捕获灵敏度电平。 在首次定位时间TTFF的测试过程中,主要设置仿真模式、地理位置、UTC时间、卫星功率和数量等参数。 捕获灵敏度测试 导航接收机的灵敏度包括捕获灵敏度和跟踪灵敏度。其中,捕获灵敏度指的是接收机本身在失锁的情况下,捕获GNSS信号的最小接收电平。在导航接收机的测试中,灵敏度有两种统计方法: 定位精度统计法:即当定位精度小于某一个给定值的时候,计算当前的接收功率,作为接收机的灵敏度; CN0统计法:即通过捕获到的卫星载噪比的方式,计算当前的接收电平,作为接收机的灵敏度。其中,灵敏度和CN0直接的关系如下: 灵敏度min= -174 dBm/Hz + C/Nmin + NFrecievre 追踪灵敏度测试 跟踪灵敏度指的是接收机本身定位的情况下,由于卫星信号的遮挡或衰减等,造成接收机的接收电平降低,直到接收机失锁或定位精度下降到100 m左右的的情况下,导航接收机所接收到最小电平。 由于跟踪灵敏度相对比较小,大多都能达到-155 dBm左右,甚至更低,而导航模拟器本身的输出电平一般在-145dBm左右。因此,必要的时候,可以使用外接衰减器的方式进行灵敏度测试。 生产灵敏度测试 在GNSS模块和接收机的生产测试过程中,需要检查基本的GNSS接收性能。基于¸SMBV100A的GNSS生产测试仪,在L1/E1频段,模拟GPS、Glonass、Galileo和BeiDou导航标准的卫星。4颗卫星可单独激活,每个具有34 dB的动态范围。电平可在飞行中改变,不需要中断信号,这使用户能够同时为每个系统执行独立的灵敏度测试。大动态范围提供了充足的余量,以适应芯片组的差异。除GNSS信号外,该GNSS生产测试仪还能为校准具有明显更高电平的装置而进行的非常基本的测试生成纯净、电平稳定的连续波信号,或者干脆作为干扰源使用。 静态定位精度测试 定位精度是指导航接收机定位的位置与真实位置的接近程度,一般需要测试其绝对精度、可重复性和移动状态下的定位精度。 为了测试绝对定位精度,SMBV模拟不同的静态位置,例如参考坐标半径内的任意位置,接收机的上报位置信息会和模拟位置进行比较,计算2D和3D误差,最终误差量是不同地点误差的平均值。该测试项参考电平设置为高于捕获灵敏度电平。 和TTFF测试项一样,定位精度测试是在很多不同条件下配置不同的卫星星图重复测试得到。 动态定位精度测试 测试中SMBV模拟接收机沿指定路径移动,最佳模拟方式是“Auto Localization“,但如果用户需要完全控制卫星模拟也可以使用”User Localization“模式。 SMBV自带一些轨迹文件,但是用户也可以使用自定义waypoint文件。接收机上报位置和waypoint文件中的模拟位置进行比较,通过计算经度、纬度和高度差获得2D和3D误差。 如何比较车载导航接收机上报的位置与导航模拟器的waypoint文件进行比较?SMBV100A/SMW200A卫星导航模拟器自带Data Logging分析功能,可以自动生成导航模拟器的waypoint文件,然后与接收机上报的NMEA数据进行实时对比,即可完成实时的动态定位精度测试。 重新捕获时间测试 重新捕获时间是指接收机在位置信息丢失后,重新获得卫星信号和位置信息所需的时间。该项测试是为了验证接收机在短时间丢失所有信号后能在多短时间内重新捕获卫星信号,重新捕获时间对车载导航接收机来说非常重要。测试过程中SMBV配置为“User Localization”模式,先关闭所有模拟卫星信号,等待一段时间后恢复卫星可视性,参考电平通常设置为高于捕获灵敏度电平。 重新捕获时间的测试,可采用两种方式进行,一是直接通过开关导航模拟器的射频,进行测试;二是通过导航模拟器自带的隧道模型或停车场模型完成测试。 除了标准接收机测试,后期将更新更多车载导航的接收机测试,罗德与施瓦茨提供的这些测试将为车载导航接收机的测试和验证创建一个标准验证流程,推动车载卫星导航系统的发展。
R&S标准接收机测试方案
之前给大家介绍过车载卫星导航以及车载卫星导航在测试中遇到的难题,对此,罗德与施瓦茨公司提供了实时卫星导航模拟器SMBV100A以及实时高端卫星导航模拟器SMW200A,在GNSS接收机测试环境中可为工程师提供最大的灵活性,帮助他们实施调整和控制,轻松地进行重复测试。
不仅如此,罗德与施瓦茨公司还提供了以卫星导航模拟器SMBV100A为基础的车载导航测试解决方案以及高端导航模拟器SMW200A为主的先进车载导航测试方案。包括标准接收机测试、特殊条件下测试、特殊事件下的测试、先进的接收机测试、车载导航自动化测试等。
其中标准接收机测试是指的常见的接收机测试项目,是接收机基本性能的重要保证。车载导航标准接收机的测试,包括:首次定位时间、捕获/跟踪灵敏度、静态/动态定位精度、重新捕获时间等指标。
首次定位时间TTFF
首次定位时间 (Time to first fix,TTFF) 指的是接收机首次搜星获得定位的时间,该指标非常重要,直接影响接收机用户的使用感受。测试过程中SMBV模拟固定位置的卫星星座图,用户可以把SMBV设置成“Auto Localization”模式,该模式下SMBV自动设置卫星参数,用户可以选择预定义的城市或者自定义坐标,模拟的卫星总数最多可达到24颗。对于该项测试,参考电平通常设置为高于捕获灵敏度电平。
在首次定位时间TTFF的测试过程中,主要设置仿真模式、地理位置、UTC时间、卫星功率和数量等参数。
捕获灵敏度测试
导航接收机的灵敏度包括捕获灵敏度和跟踪灵敏度。其中,捕获灵敏度指的是接收机本身在失锁的情况下,捕获GNSS信号的最小接收电平。在导航接收机的测试中,灵敏度有两种统计方法:
定位精度统计法:即当定位精度小于某一个给定值的时候,计算当前的接收功率,作为接收机的灵敏度;
CN0统计法:即通过捕获到的卫星载噪比的方式,计算当前的接收电平,作为接收机的灵敏度。其中,灵敏度和CN0直接的关系如下:
灵敏度min= -174 dBm/Hz + C/Nmin + NFrecievre
追踪灵敏度测试
跟踪灵敏度指的是接收机本身定位的情况下,由于卫星信号的遮挡或衰减等,造成接收机的接收电平降低,直到接收机失锁或定位精度下降到100 m左右的的情况下,导航接收机所接收到最小电平。
由于跟踪灵敏度相对比较小,大多都能达到-155 dBm左右,甚至更低,而导航模拟器本身的输出电平一般在-145dBm左右。因此,必要的时候,可以使用外接衰减器的方式进行灵敏度测试。
生产灵敏度测试
在GNSS模块和接收机的生产测试过程中,需要检查基本的GNSS接收性能。基于¸SMBV100A的GNSS生产测试仪,在L1/E1频段,模拟GPS、Glonass、Galileo和BeiDou导航标准的卫星。4颗卫星可单独激活,每个具有34 dB的动态范围。电平可在飞行中改变,不需要中断信号,这使用户能够同时为每个系统执行独立的灵敏度测试。大动态范围提供了充足的余量,以适应芯片组的差异。除GNSS信号外,该GNSS生产测试仪还能为校准具有明显更高电平的装置而进行的非常基本的测试生成纯净、电平稳定的连续波信号,或者干脆作为干扰源使用。
静态定位精度测试
定位精度是指导航接收机定位的位置与真实位置的接近程度,一般需要测试其绝对精度、可重复性和移动状态下的定位精度。
为了测试绝对定位精度,SMBV模拟不同的静态位置,例如参考坐标半径内的任意位置,接收机的上报位置信息会和模拟位置进行比较,计算2D和3D误差,最终误差量是不同地点误差的平均值。该测试项参考电平设置为高于捕获灵敏度电平。
和TTFF测试项一样,定位精度测试是在很多不同条件下配置不同的卫星星图重复测试得到。
动态定位精度测试
测试中SMBV模拟接收机沿指定路径移动,最佳模拟方式是“Auto Localization“,但如果用户需要完全控制卫星模拟也可以使用”User Localization“模式。
SMBV自带一些轨迹文件,但是用户也可以使用自定义waypoint文件。接收机上报位置和waypoint文件中的模拟位置进行比较,通过计算经度、纬度和高度差获得2D和3D误差。
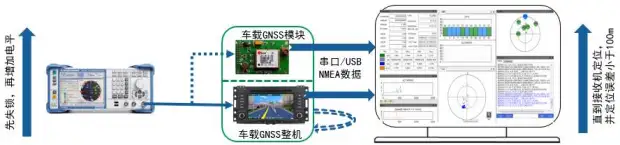
如何比较车载导航接收机上报的位置与导航模拟器的waypoint文件进行比较?SMBV100A/SMW200A卫星导航模拟器自带Data Logging分析功能,可以自动生成导航模拟器的waypoint文件,然后与接收机上报的NMEA数据进行实时对比,即可完成实时的动态定位精度测试。
重新捕获时间测试
重新捕获时间是指接收机在位置信息丢失后,重新获得卫星信号和位置信息所需的时间。该项测试是为了验证接收机在短时间丢失所有信号后能在多短时间内重新捕获卫星信号,重新捕获时间对车载导航接收机来说非常重要。测试过程中SMBV配置为“User Localization”模式,先关闭所有模拟卫星信号,等待一段时间后恢复卫星可视性,参考电平通常设置为高于捕获灵敏度电平。
重新捕获时间的测试,可采用两种方式进行,一是直接通过开关导航模拟器的射频,进行测试;二是通过导航模拟器自带的隧道模型或停车场模型完成测试。
除了标准接收机测试,后期将更新更多车载导航的接收机测试,罗德与施瓦茨提供的这些测试将为车载导航接收机的测试和验证创建一个标准验证流程,推动车载卫星导航系统的发展。
上一页
车联网测试方案
下一页
相关推荐

适用于广播电视、导航、蜂窝和无线应用的多标准平台 全软件选件定义的矢量信号发生器,具备 5" 触摸屏 先进的射频信号生成概念,频率范围介于 4 kHz 至 7.125 GHz 输出功率高达 +25 dBm 调制带宽高达 240 MHz
带宽:200 MHz 至 1.5 GHz
HP-LNA02-10G 低噪放
